Néhány, – az MR-J4-A szervó családból már ismert – új funkcióval bővült az MR-JE-A termékcsalád.
A pozíció táblás és a program metódusú vezérlésen túl, a simple cam, a jeladó követés és mark detektálás funkcióval bővült a termékcsalád, melyekről az alábbiakban szeretnénk tájékoztatást nyújtani:
Pozíció táblás vezérlés
Könnyen beállítható pozíció adatok, szervó motor sebesség, gyorsítás és lassítás. Egy start jel után meghívható pozíció táblás vezérlés, akár 31 beállítható pozíció sorral!

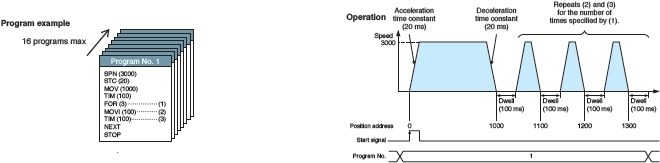
Program vezérlés
Létrehozhatóak pozicionáló programok, a start jel után kiválasztható melyik pozicionáló programot szeretnénk meghívni. Ebben a vezérlési metódusban bonyolultabb vezérlés valósítható meg, mint a Pozíció táblásban. Maximum 16 program készíthető.
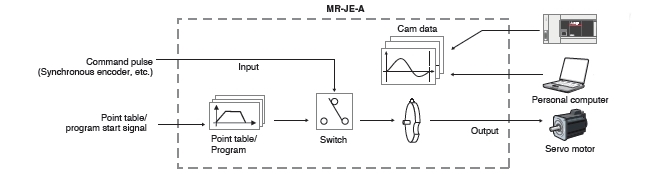
Simple Cam – Vezérlőtárcsás vezérlés
12 különböző fajta Cam adatot hozhatunk létre, melyek lehetnek – többek között – állandó sebességű, állandó gyorsulással, torz trapéz, torzított szinusz, torz, állandó sebesség, trapéz, fordított trapéz….. Impulzus parancsos, vagy Pozíció táblás bemenetet tudunk adni a Simple Camnek. A bemeneti adatok ezután kerülnek kiadásra a szervo motorra a Cam adatokkal módosítva.
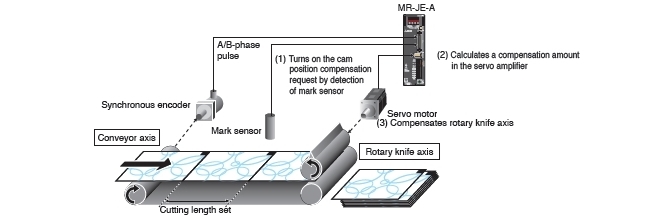
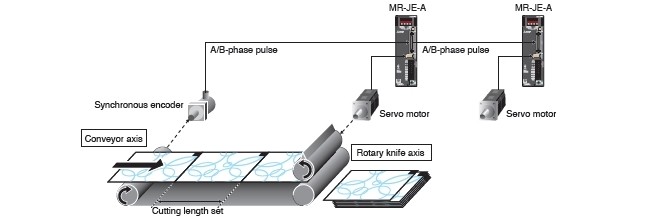
Jeladó követés
Ahogy a lenti ábra is mutatja, a szervo erősítő megkapja a jeladó kimeneti jelét és a simple cam (vezérlőtárcsás vezérlés) adataival kiegészítve (forgó kés átmérője, szalag hossza..) adja ki a szervo motornak a parancsot. Ezt a kimenő jelet továbbítani lehet egy másik szervo erősítőre, mellyel így könnyen hozhatunk létre szinkron hajtást is.
Mark detektálás
A szervo motor aktuális pozíciójából és a bemeneti szenzorok alapján a szervo kiszámolja a kompenzációs értékeket és korrigálja a forgókés elmozdulását..