A Mitsubishi robotok a Melfa SafePlus kiegészítővel alkalmasak kooperatív robot vagy kollaboratív robot alkalmazások megvalósítására.
 Az opcionális “MELFA SafePlus” biztonsági technológia a Mitsubishi Electric F sorozatú robotokkal használható. Az alábbi fő funkciók: a biztonságosan korlátozott sebesség (SLS), a biztonságosan korlátozott pozíció (SLP) és a biztonságos nyomaték tartomány (STR), melyek biztonsági bemeneteken keresztül aktiválhatóak. A funkcióknak köszönhetően a Mitsubishi Electric F sorozató robotok egyszerűen integrálhatók biztonsági rendszerekbe. Ezen tulajdonságok alapján kevesebb biztonsági eszköz és kisebb biztonsági terület szükséges, ennek eredménye a költség- és helymegtakarítás miközben az összes biztonsági követelménynek megfelel.
Az opcionális “MELFA SafePlus” biztonsági technológia a Mitsubishi Electric F sorozatú robotokkal használható. Az alábbi fő funkciók: a biztonságosan korlátozott sebesség (SLS), a biztonságosan korlátozott pozíció (SLP) és a biztonságos nyomaték tartomány (STR), melyek biztonsági bemeneteken keresztül aktiválhatóak. A funkcióknak köszönhetően a Mitsubishi Electric F sorozató robotok egyszerűen integrálhatók biztonsági rendszerekbe. Ezen tulajdonságok alapján kevesebb biztonsági eszköz és kisebb biztonsági terület szükséges, ennek eredménye a költség- és helymegtakarítás miközben az összes biztonsági követelménynek megfelel.
Biztonságtechnikai kérdésekkel és az alkamazási lehetőségekkel kapcsolatban keresse mérnökeinket!
| Biztonsági Funkció |
Leírás | Vonatkozó szabvány | Megjegyzés |
| SLS | Biztonságosan korlátozott sebesség (Safely Limited Speed) |
EN61800-5-2 szerinti hajtásbiztonsági funkció |
Biztonsági bemenet aktiválása esetén a robotkar végpontjának sebessége nem lépheti túl a maximális 250mm/s sebességet. |
| SLP | Biztonságosan korlátozott pozíció (Safely Limited Position) |
EN61800-5-2 szerinti hajtásbiztonsági funkció |
Biztonsági bemenetek által aktivált pozíció monitorozó felületet a robot nem lépheti át. Ez a funkció több, a robothoz kapcsolódó objektumot (gömb) monitoroz és ha valamelyik érintkezik a kiválasztott pozíció monitorozó felülettel, akkor a robot azonnal leáll. Összesen 8 darab virtuális biztonsági sík definiálható. |
| STR | Biztonságos nyomaték tartomány (Safe Torque Range ) |
EN61800-5-2 szerinti hajtásbiztonsági funkció |
A visszacsatolt nyomaték nem haladhatja meg az engedélyezett nyomaték tartományt. |
| STO | Biztonságosan lekapcsolt nyomaték (Safety Torque Off) |
Megfelel az IEC 60204-1 0. leállítási kategóriának |
Szervo hajtások vezérlésének biztonságos lekapcsolása, ami a nyomaték megszűnésével jár |
| SS1 | 1. biztonságos leállítás (Safe Stop 1) |
Megfelel az IEC 60204-1 1. leállítási kategóriának |
STO előtt a motorok biztonságos leállítása előre megadott időn belül |
A felhasználó előnyei
- Folyamatos termelés – elkerülve a leállásokat és az azt követő hosszadalmas újraindítási procedúrát
- Termelékenység és rugalmasság növelése
- Költségcsökkentés
- Biztonságosan korlátozott munkaterület eredményeképpen helymegtakarítás
- A teljes gép egyszerűbb kivitelezése és minősítése a biztonsági szabványok teljesítése révén
Az alábbiakban felsorolunk néhány alkalmazási lehetőséget. A példák nem teljesek, csak tájékoztató jellegűek.
A legmegfelelőbb biztonságtechnikai megoldás kiválasztásához keresse mérnökeinket!
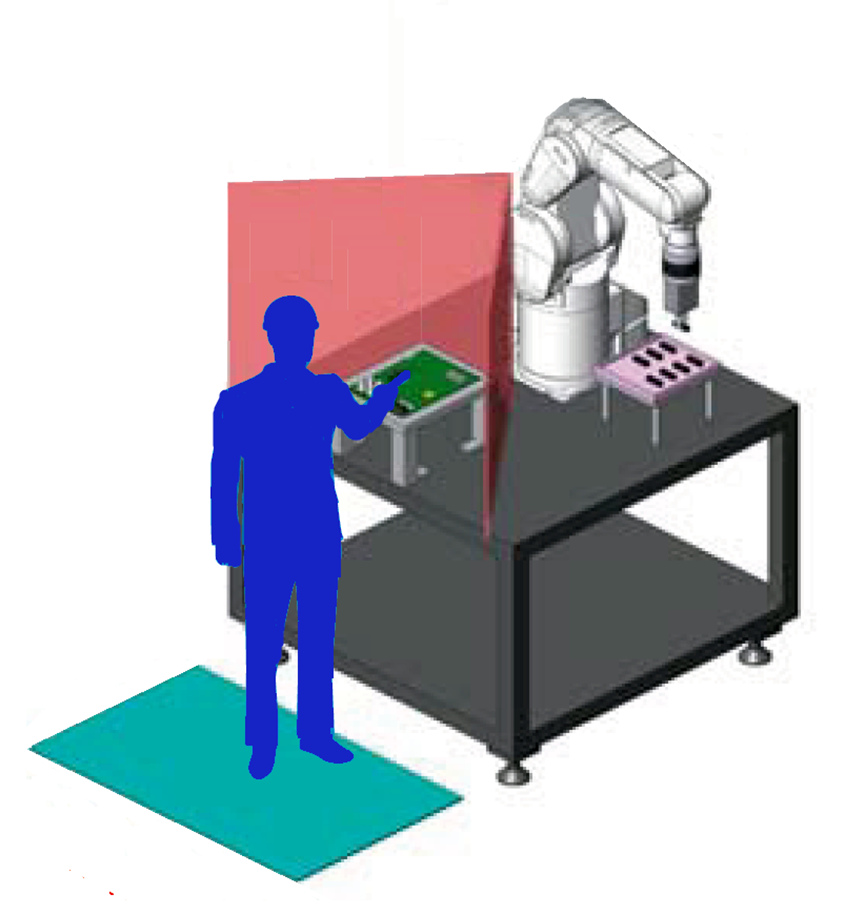
1. Példa: Közös Munkaterület különböző időben – SLP funkció
Az operátor és a robot a közös területet csak felváltva érhetik el, engedélyezve a kooperatív munkát a robot és az operátor között.
 |
<Magyarázat>
|
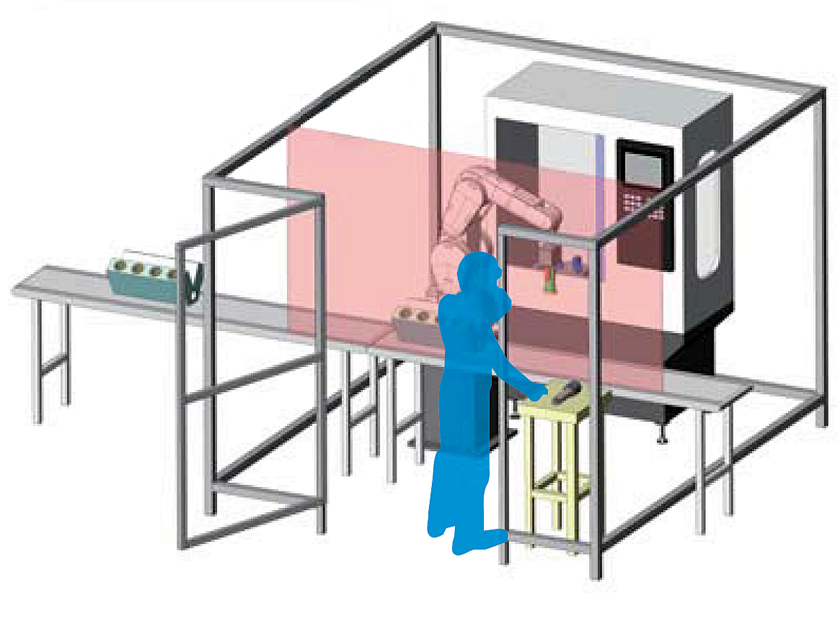
2. Példa: „Közeli” Szeparált munkaterület
Az operátor munkaterülete és a robot munkaterülete egy virtuális biztonsági síkkal van elhatárolva egymástól
 |
<Magyarázat>
|
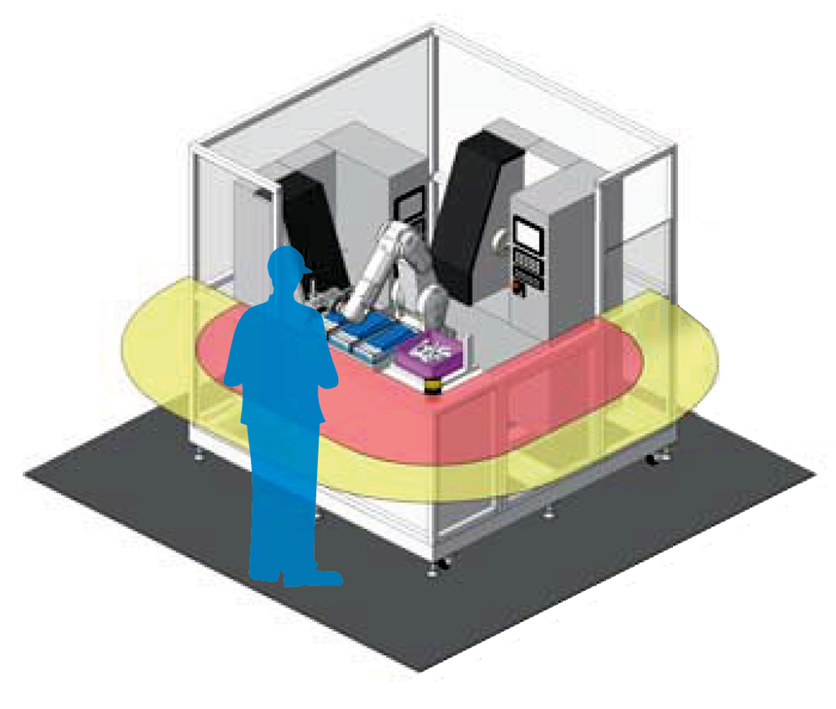
3. Példa: Biztonsági terület szenzor használata
A gép munkaterét biztonsági szenzorok (pl. lézerszkenner) vizsgálja és a robot működése az operátor helyzetétől függ.
 |
<Magyarázat>
|
Az opcionális MelfaSafePlus blokkvázlata
 |
Mi szükséges a Mitsubishi Melfa SafePlus robot megoldáshoz?
Használati útmutató: CR750/CR751 Controller Robot Safety Option Instruction Manual (BFP-A3372) |